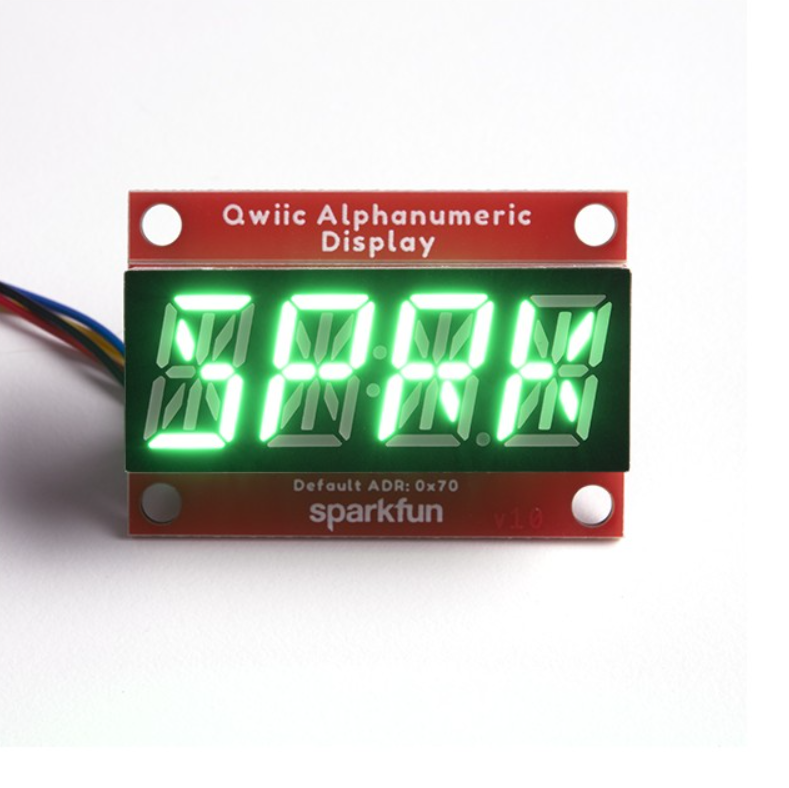
Do oferty wprowadziliśmy moduły z 4-elementowymi, segmentowymi wyświetlaczami LED, w kilku kolorach (biały, fioletowy, niebieski, czerwony, różowy, zielony). Każdy z czterech wyświetlaczy LED jest zbudowany z 14 segmentów, dzięki czemu może wyświetlać nie tylko cyfry, jak standardowy 7-segmentowy wyświetlacz, ale … Czytaj dalej