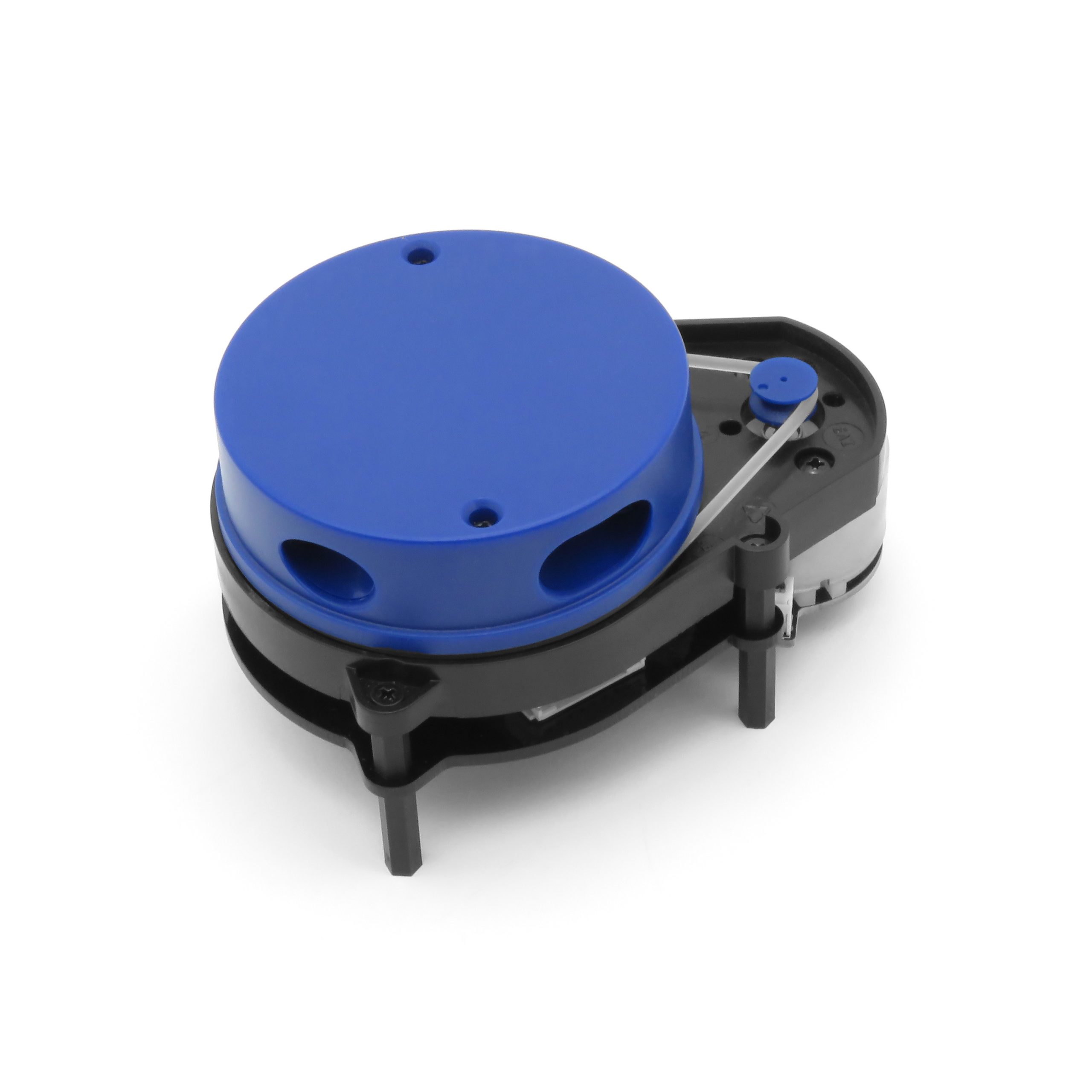
Wprowadziliśmy do oferty budżetowy skaner laserowy LIDAR X4, który może być interesującą alternatywą dla zaawansowanych produktów firmy Slamtec. Skaner działa w zakresie 360° z częstotliwością pojedynczego pomiaru 5 000 Hz, co przykłada się na rozdzielczość pełnego pomiaru w zakresie od … Czytaj dalej