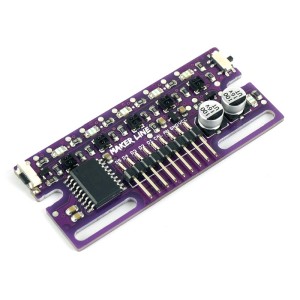
M5Stack BugC to zestaw do samodzielnego zmontowania robota-robaka. Podwozie wyposażone zostało w cztery silniki i dwie diody RGB. Silniki są kontrolowane przez sterownik oraz mikrokontroler STM32F030, który komunikuje się przez interfejs I2C. M5Stack BugC jest wyposażony w koszyk oraz dołączony … Czytaj dalej