


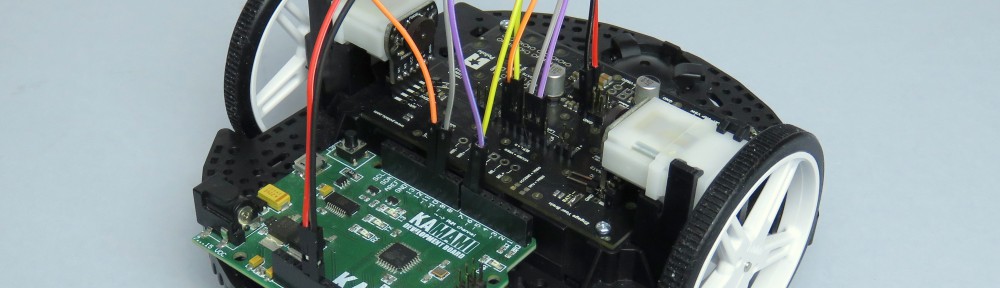
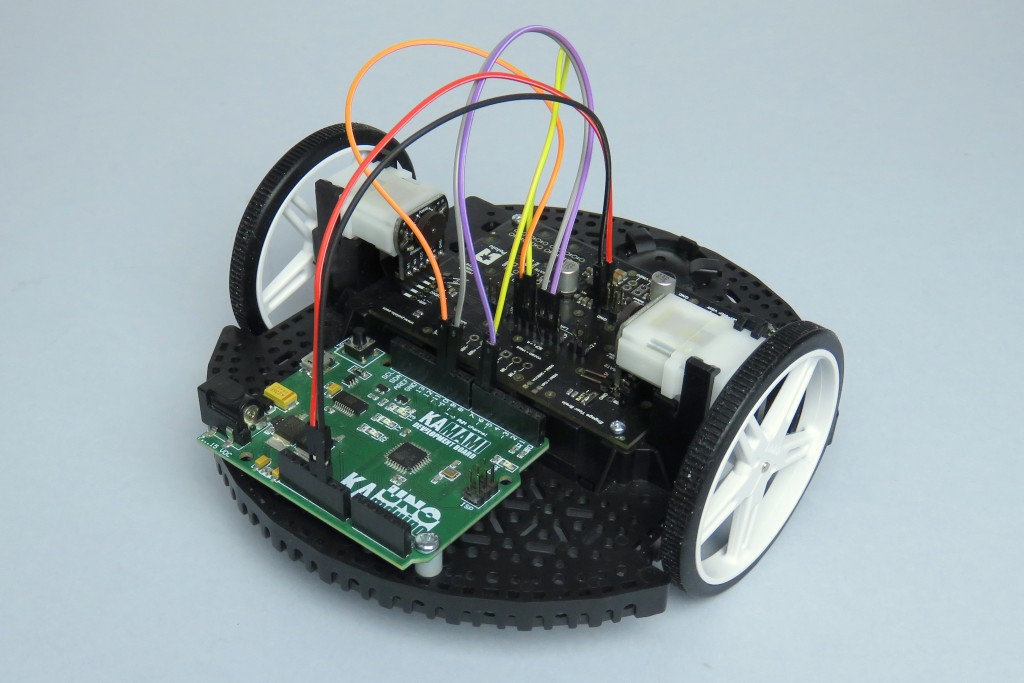
W portalu MIKROKONTROLER.pl dostępne są artykuły prezentujące budowę robota mobilnego, bazującego na podwoziu Romi Chassis (dostępne w dwóch kolorach: czerwonym i czarnym). W pierwszym z opublikowanych artykułów pokazano montaż podwozia i jego pierwsze uruchomienie, w drugim obsługę enkoderów współpracujących z kołami. Kolejne części artykułów przeprowadzą czytelników przez następne zagadnienia związane z budową i programowaniem mobilnych robotów. Sterownikiem robota w prezentowanych przykładach jest płytka KAmduino, zgodna z Arudino Uno Rev. 3.