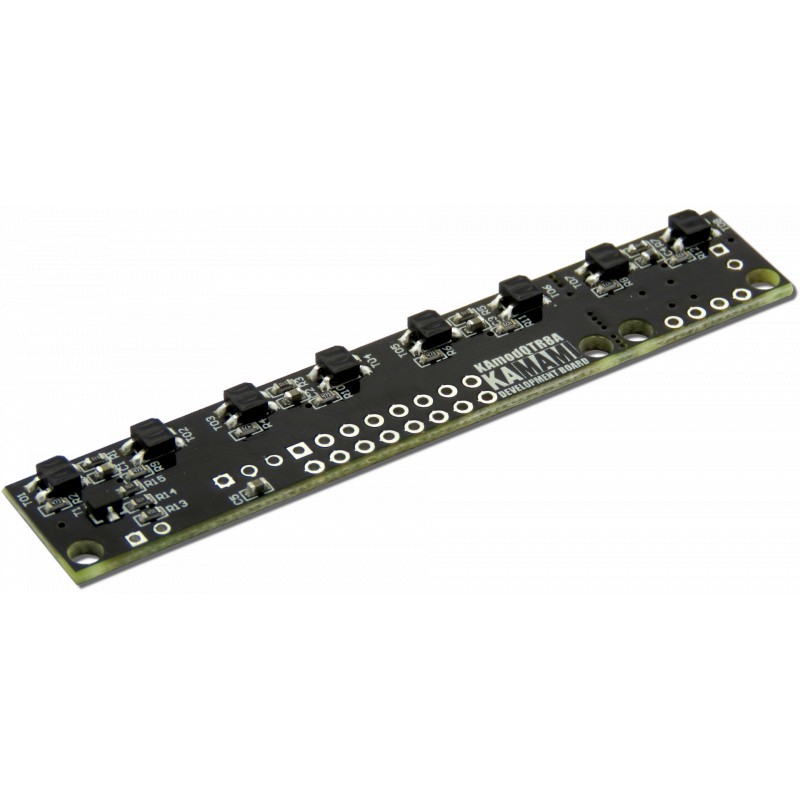
Moduł KAmodQTR8A to idealny czujnik do wykrywania linii lub przepaści dla robotów typu Linefollower. Został zbudowany w oparciu o 8 transoptorów odbiciowych KTIR0711S. Płytka czujnika została zaprojektowana tak, aby można było w łatwy sposób oddzielić dwa transoptory i zamontować je … Czytaj dalej